Traditional PyTorch approach with TorchGeo and TerraTorch
Introduction
This session introduces foundation model workflows using TorchGeo and TerraTorch. You’ll learn to work with benchmark datasets, build production-ready models, and understand the fundamentals of geospatial deep learning with explicit PyTorch training loops.
Learning Objectives
By the end of this session, you will be able to:
Load benchmark datasets using TorchGeo
Build foundation models using TerraTorch’s EncoderDecoderFactory
Evaluate zero-shot performance and understand transfer learning
Implement few-shot learning with prototype networks
Use linear probing for efficient model adaptation
Train models using explicit PyTorch loops
Compare data efficiency across different training regimes
Why This Approach?
Traditional PyTorch training loops (see every step)
Pre-trained foundation models (Prithvi, SatMAE, etc.)
Model factory for easy configuration
Encoder-decoder architectures
Task-specific heads
The EuroSAT Benchmark
EuroSAT is a land use classification dataset based on Sentinel-2 imagery.
Dataset Statistics:
Total images: ~27,000
Image size: 64×64 pixels
Bands: 13 (all Sentinel-2 bands)
Resolution: 10m, 20m, 60m (resampled to uniform grid)
Classes: 10 land use categories (original dataset)
Note: The TorchGeo version may have 9 classes. The code dynamically adapts to the actual number of classes in train_dataset.classes.
Typical Land Use Classes:
AnnualCrop
Forest
HerbaceousVegetation
Highway
Industrial
Pasture
PermanentCrop
Residential
River (may be merged with SeaLake in some versions)
Published Benchmarks:
ResNet-50: ~98% accuracy
VGG-16: ~97% accuracy
AlexNet: ~94% accuracy
Citation:
Helber, P., Bischke, B., Dengel, A., & Borth, D. (2019). EuroSAT: A novel dataset and deep learning benchmark for land use and land cover classification. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 12(7), 2217-2226.
Setup and Installation
import torchimport torch.nn as nnfrom torch.utils.data import DataLoaderimport numpy as npimport matplotlib.pyplot as pltfrom pathlib import Pathimport logginglogger = logging.getLogger(__name__)# Set logging level to INFOlogger.setLevel(logging.INFO)# Add handler for Jupyter notebook outputifnot logger.handlers: handler = logging.StreamHandler() handler.setLevel(logging.INFO) formatter = logging.Formatter('%(message)s') handler.setFormatter(formatter) logger.addHandler(handler)# Set random seeds for reproducibilitytorch.manual_seed(42)np.random.seed(42)# Device selectionif torch.cuda.is_available(): device = torch.device('cuda') logger.info(f"Using CUDA GPU: {torch.cuda.get_device_name(0)}")elif torch.backends.mps.is_available(): device = torch.device('mps') logger.info("Using Apple Silicon MPS")else: device = torch.device('cpu') logger.info("Using CPU (training will be slower)")logger.info(f"PyTorch version: {torch.__version__}")
Using Apple Silicon MPS
PyTorch version: 2.7.1
Part 2: Classification with EuroSAT
Step 1: Load the Dataset
TorchGeo makes loading benchmark datasets simple and standardized.
from torchgeo.datasets import EuroSAT# Define data directorydata_dir = Path("data")data_dir.mkdir(exist_ok=True)# Load EuroSAT dataset with all bands# First time will download ~90MB datasetlogger.info("Loading EuroSAT dataset...")train_dataset = EuroSAT( root=str(data_dir), split="train", download=True)val_dataset = EuroSAT( root=str(data_dir), split="val", download=True)test_dataset = EuroSAT( root=str(data_dir), split="test", download=True)logger.info(f"Training samples: {len(train_dataset)}")logger.info(f"Validation samples: {len(val_dataset)}")logger.info(f"Test samples: {len(test_dataset)}")logger.info(f"Number of classes: {len(train_dataset.classes)}")logger.info(f"Classes: {train_dataset.classes}")
Loading EuroSAT dataset...
Training samples: 16200
Validation samples: 5400
Test samples: 5400
Number of classes: 10
Classes: ['AnnualCrop', 'Forest', 'HerbaceousVegetation', 'Highway', 'Industrial', 'Pasture', 'PermanentCrop', 'Residential', 'River', 'SeaLake']
Understanding the Dataset Object
The train_dataset is a PyTorch Dataset object with:
__len__() - Returns number of samples
__getitem__(idx) - Returns (image, label) tuple
.classes - List of class names
.split - Current split (train/val/test)
This standardization means the same code works for any TorchGeo dataset.
Step 2: Explore the Data
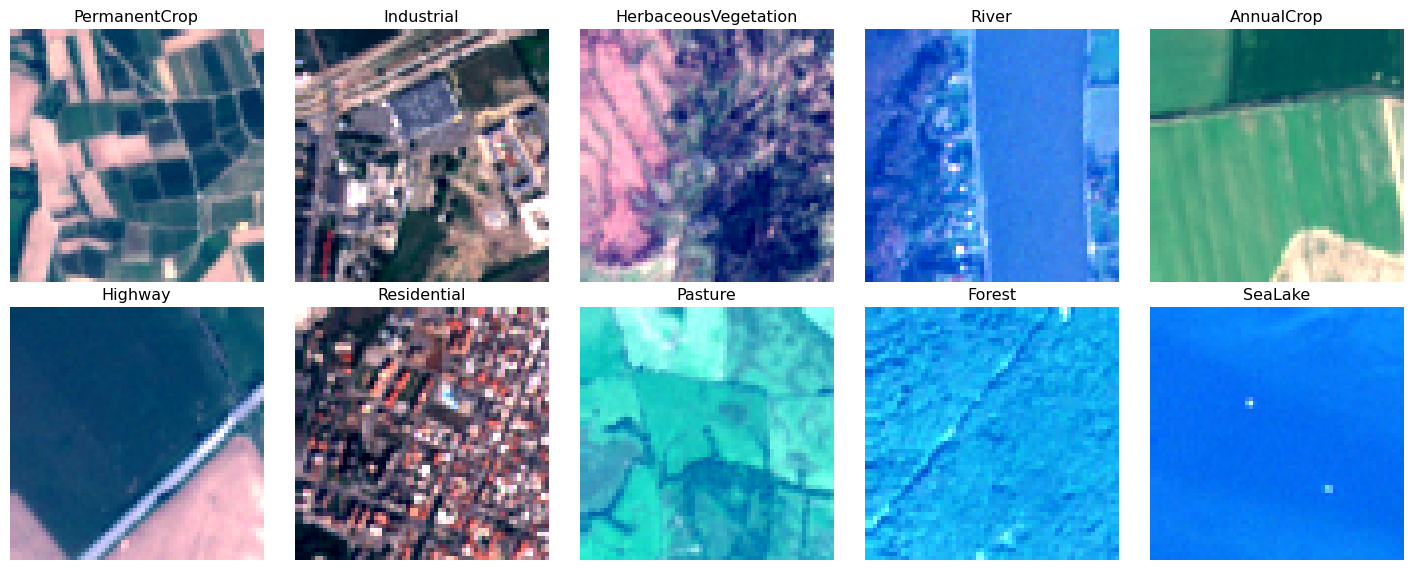
Let’s visualize samples from each class to understand what we’re working with.
# Get one sample from each class efficiently using random samplingimport randomsamples_per_class = {}num_classes =len(train_dataset.classes)dataset_size =len(train_dataset)# Random sampling is much faster than sequential scan# Sample more indices than classes to ensure we find all classes quicklyrandom_indices = random.sample(range(dataset_size), min(dataset_size, num_classes *10))logger.info(f"Sampling representative images (one per class)...")for idx in random_indices: sample = train_dataset[idx] image = sample["image"] label = sample["label"] class_idx =int(label) ifhasattr(label, "item") else labelif class_idx notin samples_per_class: samples_per_class[class_idx] = image# Stop once we have all classesifset(samples_per_class.keys()) ==set(range(num_classes)): logger.info(f"Found all {num_classes} classes in {len(samples_per_class)} samples")break# Create RGB composite for visualization# EuroSAT bands: [B01, B02, B03, B04, B05, B06, B07, B08, B8A, B09, B10, B11, B12]# RGB = B04 (Red), B03 (Green), B02 (Blue) = indices [3, 2, 1]# Dynamic grid based on actual number of classes foundn_samples =len(samples_per_class)n_cols =5n_rows =int(np.ceil(n_samples / n_cols))fig, axes = plt.subplots(n_rows, n_cols, figsize=(15, 3*n_rows))axes = axes.ravel()for idx, (label, image) inenumerate(samples_per_class.items()):# Extract RGB bands rgb = image[[3, 2, 1], :, :].numpy() # Red, Green, Blue rgb = np.transpose(rgb, (1, 2, 0)) # (H, W, C)# Normalize for display (using percentile stretch) p2, p98 = np.percentile(rgb, (2, 98)) rgb_norm = np.clip((rgb - p2) / (p98 - p2), 0, 1) axes[idx].imshow(rgb_norm) axes[idx].set_title(train_dataset.classes[label]) axes[idx].axis('off')# Hide any unused subplotsfor idx inrange(n_samples, len(axes)): axes[idx].axis('off')plt.tight_layout()plt.show()# Print band information and data rangelogger.info(f"\nImage shape: {image.shape}")logger.info(f"Bands: 13 Sentinel-2 bands")logger.info(f"Spatial size: 64×64 pixels")logger.info(f"")logger.info(f"Raw EuroSAT data range:")logger.info(f" Min value: {image.min():.2f}")logger.info(f" Max value: {image.max():.2f}")logger.info(f" Mean value: {image.mean():.2f}")logger.info(f"")logger.info(f"This confirms EuroSAT is NOT pre-normalized!")logger.info(f"Typical Sentinel-2 range: 0-10000 (surface reflectance × 10000)")
Sampling representative images (one per class)...
Found all 10 classes in 10 samples
Image shape: torch.Size([13, 64, 64])
Bands: 13 Sentinel-2 bands
Spatial size: 64×64 pixels
Raw EuroSAT data range:
Min value: 5.00
Max value: 1236.00
Mean value: 337.57
This confirms EuroSAT is NOT pre-normalized!
Typical Sentinel-2 range: 0-10000 (surface reflectance × 10000)
Band Selection Strategy
Challenge: Prithvi expects 6 bands, EuroSAT has 13 bands.
Solution: Select the 6 bands Prithvi was trained on:
B02 (Blue) - 10m
B03 (Green) - 10m
B04 (Red) - 10m
B08 (NIR) - 10m
B11 (SWIR1) - 20m
B12 (SWIR2) - 20m
EuroSAT indices: [1, 2, 3, 7, 11, 12]
Step 3: Create Data Transforms
We need to select the correct bands and normalize the data for Prithvi.
Critical Understanding:
EuroSAT raw data: Sentinel-2 surface reflectance values (typically 0-10000+)
Prithvi expects: Normalized values in range [0, 1]
Why this matters: Without normalization, the model gets completely out-of-distribution inputs
Result without normalization: Zero-shot accuracy ~10% (random guessing)
import torchdef select_prithvi_bands(sample):""" Select the 6 bands Prithvi was trained on from EuroSAT's 13 bands. Parameters ---------- sample : dict TorchGeo sample with 'image' and 'label' keys Returns ------- dict Sample with 6-band image """# EuroSAT band order: [B01, B02, B03, B04, B05, B06, B07, B08, B8A, B09, B10, B11, B12]# Prithvi bands: [B02, B03, B04, B08, B11, B12]# Indices: [1, 2, 3, 7, 11, 12] image = sample['image'] selected_bands = image[[1, 2, 3, 7, 11, 12], :, :]return {'image': selected_bands,'label': sample['label'] }def normalize_prithvi(sample):""" Normalize imagery for Prithvi using per-sample normalization. In production, you would want to use global statistics from the training set. For this demo, we use per-sample percentile normalization. Parameters ---------- sample : dict Sample with 'image' and 'label' Returns ------- dict Sample with normalized image """ image = sample['image']# Normalize each band independently using 2nd-98th percentile normalized = torch.zeros_like(image)for c inrange(image.shape[0]): band = image[c] p2, p98 = torch.quantile(band, torch.tensor([0.02, 0.98])) normalized[c] = torch.clamp((band - p2) / (p98 - p2 +1e-8), 0, 1)return {'image': normalized,'label': sample['label'] }
from torchvision import transforms# Compose transformstransform = transforms.Compose([ select_prithvi_bands, normalize_prithvi # Critical for Prithvi - expects [0, 1] normalized inputs])# Apply transforms to datasetsclass TransformedDataset(torch.utils.data.Dataset):"""Wrapper to apply transforms to TorchGeo datasets."""def__init__(self, dataset, transform=None):self.dataset = datasetself.transform = transformdef__len__(self):returnlen(self.dataset)def__getitem__(self, idx): sample =self.dataset[idx]ifself.transform: sample =self.transform(sample)return sample['image'], sample['label']train_dataset_transformed = TransformedDataset(train_dataset, transform)val_dataset_transformed = TransformedDataset(val_dataset, transform)test_dataset_transformed = TransformedDataset(test_dataset, transform)# Test the transformationsample_img, sample_label = train_dataset_transformed[0]logger.info(f"Transformed image shape: {sample_img.shape}")logger.info(f"Expected: (6, 64, 64)")logger.info(f"Label: {sample_label} ({train_dataset.classes[sample_label]})")logger.info(f"Value range: [{sample_img.min():.4f}, {sample_img.max():.4f}]")logger.info(f"Expected range: [0, 1] after normalization")
DataLoaders handle batching, shuffling, and parallel data loading.
# Create DataLoaderstrain_loader = DataLoader( train_dataset_transformed, batch_size=32, shuffle=True, num_workers=0# Set to 0 for Windows, 4+ for Linux/Mac)val_loader = DataLoader( val_dataset_transformed, batch_size=32, shuffle=False, num_workers=0)test_loader = DataLoader( test_dataset_transformed, batch_size=32, shuffle=False, num_workers=0)logger.info(f"Training batches: {len(train_loader)}")logger.info(f"Validation batches: {len(val_loader)}")logger.info(f"Test batches: {len(test_loader)}")# Test a batchimages, labels =next(iter(train_loader))logger.info(f"\nBatch shape: {images.shape}")logger.info(f"Labels shape: {labels.shape}")logger.info(f"Batch on device will be: {images.to(device).device}")
Training batches: 507
Validation batches: 169
Test batches: 169
Batch shape: torch.Size([32, 6, 64, 64])
Labels shape: torch.Size([32])
Batch on device will be: mps:0
Step 5: Build the Model
TerraTorch’s EncoderDecoderFactory makes it simple to build models. How build_model Works
The build_model method from EncoderDecoderFactory creates a flexible model by combining a backbone (encoder) with a task-specific decoder head. For classification, the decoder will produce logits of shape [batch_size, num_classes]. This method is highly customizable and is central to TerraTorch’s architectural flexibility.
Key arguments to build_model:
task: The type of task ("classification", "segmentation", "regression", etc.)
backbone: The encoder backbone to use (e.g., "prithvi_eo_v1_100", "prithvi_eo_v2_300", "satmae", "clay", "timm_resnet50")
decoder: The decoder architecture to attach. For classification, "FCNDecoder" is a typical choice; for segmentation, you might use "SegmentationDecoder" or others suitable for the task.
num_classes: The number of output classes for classification (or channels for other tasks)
Further arguments (advanced):
pretrained: If True, will use pretrained weights for the backbone where available.
in_channels: Number of input channels; must match your data (EuroSAT uses 6 bands).
freeze_encoder: If True, the backbone weights will not be updated during training.
decoder_kwargs: Dictionary of extra arguments for fine-tuning decoder behavior.
from terratorch.models import EncoderDecoderFactory# Create model factorymodel_factory = EncoderDecoderFactory()# Build classification model with Prithvi backbonenum_classes =len(train_dataset.classes)model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", # 100M parameter Prithvi decoder="FCNDecoder", # Simple fully-convolutional decoder num_classes=num_classes # Based on actual dataset)# Move model to devicemodel = model.to(device)# Count parameterstotal_params =sum(p.numel() for p in model.parameters())trainable_params =sum(p.numel() for p in model.parameters() if p.requires_grad)logger.info(f"Model loaded: Prithvi-100M with FCN decoder")logger.info(f"Total parameters: {total_params:,}")logger.info(f"Trainable parameters: {trainable_params:,}")logger.info(f"Model on device: {next(model.parameters()).device}")
Model loaded: Prithvi-100M with FCN decoder
Total parameters: 90,176,010
Trainable parameters: 90,176,010
Model on device: mps:0
Understanding the Architecture
Encoder (Backbone):
prithvi_eo_v1_100 - Vision Transformer pretrained on HLS imagery
Extracts spatial features from 6-band input
Parameters frozen or fine-tuned depending on task
Decoder (Head):
FCNDecoder - Fully Convolutional Network
Aggregates encoder features
Produces class logits (num_classes outputs)
Alternative backbones:prithvi_eo_v2_300, satmae, scalemae, clay, timm_resnet50
Part 3: Zero-Shot Inference - Baseline Performance
Before training the model, let’s evaluate what the pretrained Prithvi backbone already knows. This establishes a baseline and demonstrates the power of transfer learning.
Understanding Zero-Shot Inference
Zero-shot inference means using a model without any task-specific training:
The Prithvi backbone was pretrained on massive HLS satellite imagery
It learned general geospatial features (vegetation patterns, water bodies, urban structures)
But it has never seen EuroSAT or these specific land use classes
The classification head is randomly initialized
Step 6: Zero-Shot Evaluation
Let’s evaluate the model using the same representative images we visualized earlier - one sample from each class.
# Use the same representative samples from Step 2# Transform them to 6 bands + normalizezero_shot_images = []zero_shot_labels = []logger.info("Preparing representative samples for zero-shot evaluation...")for class_idx, image in samples_per_class.items():# Apply transforms (band selection + normalization) sample = {'image': image, 'label': class_idx} transformed = transform(sample) zero_shot_images.append(transformed['image']) zero_shot_labels.append(transformed['label'])# Stack into batchzero_shot_images = torch.stack(zero_shot_images).to(device)zero_shot_labels = torch.tensor(zero_shot_labels).to(device)logger.info(f"Zero-shot evaluation batch: {zero_shot_images.shape}")logger.info(f"One sample per class ({len(train_dataset.classes)} total)")logger.info(f"")# Set model to evaluation modemodel.eval()# Calculate zero-shot performancelogger.info("Evaluating zero-shot performance...")logger.info("="*60)with torch.no_grad(): outputs = model(zero_shot_images)ifhasattr(outputs, 'output'): outputs = outputs.output# Get predictions _, predicted = outputs.max(1)correct = predicted.eq(zero_shot_labels).sum().item()total =len(zero_shot_labels)zero_shot_accuracy = correct / totallogger.info(f"Zero-Shot Accuracy: {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")logger.info(f"Correct: {correct}/{total} samples")logger.info(f"")logger.info("Per-Class Zero-Shot Results:")logger.info("-"*60)for idx inrange(len(zero_shot_labels)): true_label = zero_shot_labels[idx].item() pred_label = predicted[idx].item() class_name = train_dataset.classes[true_label] pred_name = train_dataset.classes[pred_label] correct_mark ="✓"if true_label == pred_label else"✗" logger.info(f" {correct_mark}{class_name:20s} → {pred_name}")
Why? Prithvi learned general geospatial features during pretraining on HLS imagery. Natural land cover classes with distinct spectral signatures are easier to recognize than specific urban subtypes.
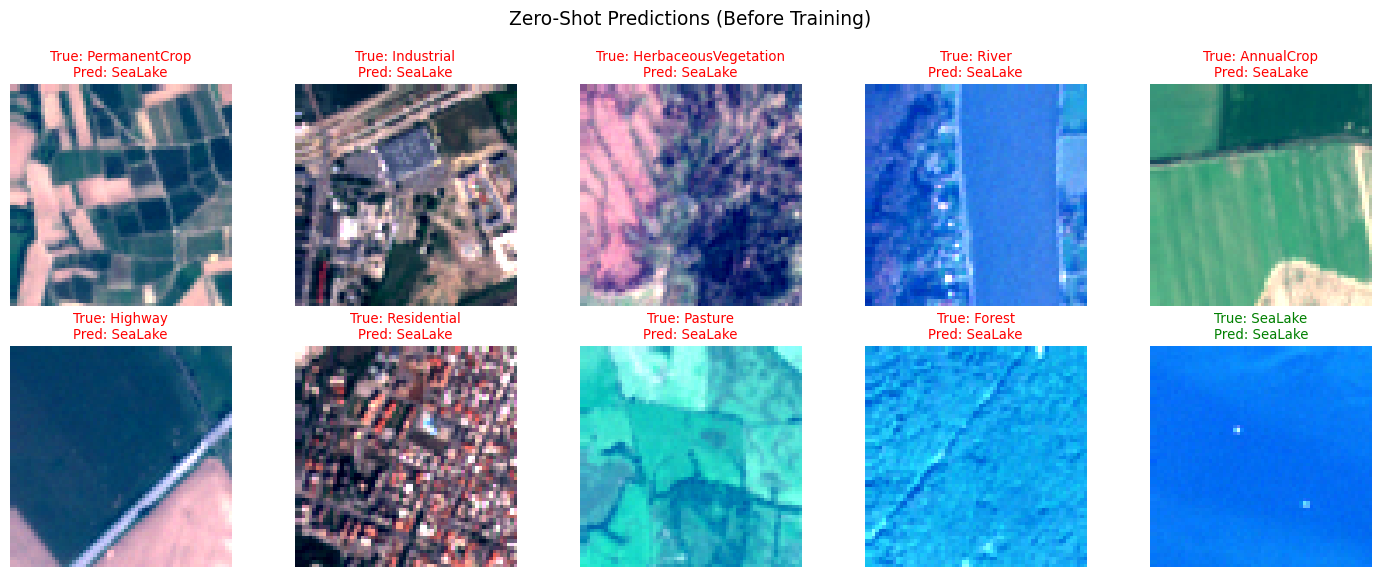
Step 7: Visualize Zero-Shot Predictions
Let’s visualize the zero-shot predictions on the same representative images:
# Visualize zero-shot predictionslogger.info("Visualizing zero-shot predictions...")num_vis =len(samples_per_class)n_cols =5n_rows =int(np.ceil(num_vis / n_cols))fig, axes = plt.subplots(n_rows, n_cols, figsize=(15, 3*n_rows))axes = axes.ravel()# Already have predictions from Step 6for idx, (class_idx, image) inenumerate(samples_per_class.items()): true_label = class_idx pred_label = predicted[idx].item()# Create RGB visualization from original 13-band image rgb = image[[3, 2, 1], :, :].numpy() # Red, Green, Blue rgb = np.transpose(rgb, (1, 2, 0))# Normalize for display p2, p98 = np.percentile(rgb, (2, 98)) rgb_norm = np.clip((rgb - p2) / (p98 - p2), 0, 1)# Plot axes[idx].imshow(rgb_norm)# Color code: green if correct, red if wrong color ='green'if pred_label == true_label else'red' axes[idx].set_title(f"True: {train_dataset.classes[true_label]}\n"f"Pred: {train_dataset.classes[pred_label]}", color=color, fontsize=10 ) axes[idx].axis('off')# Hide any unused subplotsfor idx inrange(num_vis, len(axes)): axes[idx].axis('off')plt.suptitle("Zero-Shot Predictions (Before Training)", fontsize=14, y=0.995)plt.tight_layout()plt.show()logger.info(f"Green titles = correct prediction | Red titles = incorrect prediction")
Visualizing zero-shot predictions...
Green titles = correct prediction | Red titles = incorrect prediction
Zero-Shot Performance Analysis
What to look for:
Correct predictions: Classes the model identifies without training
Systematic errors: Consistent misclassifications reveal what Prithvi confuses
Transfer learning potential: Better than random = useful pretrained features
Common patterns:
Natural land cover (forest, water) often recognized
Urban classes frequently confused with each other
Agricultural subtypes hard to distinguish without fine-tuning
Part 4: Few-Shot Learning - Learning from Limited Data
Zero-shot performance is limited by the randomly initialized decoder. But what if we had just a few examples per class? Let’s explore two few-shot approaches that demonstrate the power of foundation models with minimal data.
Helper: Create Few-Shot Datasets
First, let’s create a helper function to sample K examples per class from the training set.
from torch.utils.data import Subsetdef create_few_shot_dataset(dataset, k_shot=5, seed=42):""" Create a dataset with k examples per class. Parameters ---------- dataset : Dataset Source dataset k_shot : int Number of examples per class seed : int Random seed for reproducibility Returns ------- Subset Subset with k examples per class """ np.random.seed(seed) random.seed(seed) num_classes =len(dataset.classes) samples_per_class = {i: [] for i inrange(num_classes)}# Random sampling to find k examples per class random_indices = random.sample(range(len(dataset)), min(len(dataset), num_classes * k_shot *10))for idx in random_indices: sample = dataset[idx] label = sample['label'] label_idx =int(label) ifhasattr(label, 'item') else labeliflen(samples_per_class[label_idx]) < k_shot: samples_per_class[label_idx].append(idx)# Stop when we have k examples for all classesifall(len(v) == k_shot for v in samples_per_class.values()):break# Flatten to single list of indices indices = [idx for class_indices in samples_per_class.values() for idx in class_indices]return Subset(dataset, indices), samples_per_classlogger.info("Few-shot dataset helper created")
Few-shot dataset helper created
Step 6a: Prototype Networks - No Training Required
Prototype networks use the model’s output representations to classify by finding the nearest prototype (mean representation per class). We’ll use the model’s logits (pre-softmax outputs) as feature representations.
Key idea: Even with a randomly initialized decoder, the model’s output space should show some structure that we can exploit with a few labeled examples.
# Create 5-shot support setk_shot =5few_shot_subset, few_shot_indices = create_few_shot_dataset(train_dataset, k_shot=k_shot)logger.info(f"Created {k_shot}-shot dataset:")logger.info(f"Total samples: {len(few_shot_subset)} ({k_shot} per class × {len(train_dataset.classes)} classes)")logger.info("")# Extract features from backbone for support setmodel.eval()support_features = []support_labels = []logger.info("Extracting features from Prithvi backbone...")with torch.no_grad():for class_idx, indices in few_shot_indices.items(): class_features = []for idx in indices: sample = train_dataset[idx]# Apply transforms transformed = transform(sample) image = transformed['image'].unsqueeze(0).to(device)# Extract features from backbone# Use model forward pass and extract features before final classification outputs = model(image)ifhasattr(outputs, 'output'): features = outputs.outputelse: features = outputs# Features are already pooled to (batch, num_classes) by FCNDecoder# Use these as feature representations features = features.squeeze(0) # Remove batch dimension class_features.append(features)# Compute prototype (mean of support features) prototype = torch.stack(class_features).mean(dim=0) support_features.append(prototype) support_labels.append(class_idx)support_features = torch.stack(support_features) # (num_classes, feature_dim)support_labels = torch.tensor(support_labels).to(device)logger.info(f"Extracted prototypes: {support_features.shape}")logger.info("")# Classify test samples by nearest prototypelogger.info("Classifying with prototype networks...")test_features = []test_labels = []# Use same representative samples as zero-shotfor class_idx, image in samples_per_class.items(): sample = {'image': image, 'label': class_idx} transformed = transform(sample) image_tensor = transformed['image'].unsqueeze(0).to(device)with torch.no_grad():# Extract features outputs = model(image_tensor)ifhasattr(outputs, 'output'): features = outputs.outputelse: features = outputs features = features.squeeze(0) # Remove batch dimension test_features.append(features) test_labels.append(class_idx)test_features = torch.stack(test_features)test_labels = torch.tensor(test_labels).to(device)# Compute distances to prototypes (cosine similarity)test_features_norm = torch.nn.functional.normalize(test_features, dim=-1)support_features_norm = torch.nn.functional.normalize(support_features, dim=-1)similarities = torch.mm(test_features_norm, support_features_norm.t()) # (test, classes)proto_predictions = similarities.argmax(dim=1)# Calculate accuracyproto_correct = proto_predictions.eq(test_labels).sum().item()proto_accuracy = proto_correct /len(test_labels)logger.info(f"Prototype Network Results ({k_shot}-shot)")logger.info("="*60)logger.info(f"Accuracy: {proto_accuracy:.4f} ({proto_accuracy*100:.2f}%)")logger.info(f"Zero-shot (Step 6): {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")logger.info(f"Correct: {proto_correct}/{len(test_labels)} samples")logger.info("")logger.info("Per-Class Prototype Results:")logger.info("-"*60)for idx inrange(len(test_labels)): true_label = test_labels[idx].item() pred_label = proto_predictions[idx].item() class_name = train_dataset.classes[true_label] pred_name = train_dataset.classes[pred_label] correct_mark ="✓"if true_label == pred_label else"✗" logger.info(f" {correct_mark}{class_name:20s} → {pred_name}")
Created 5-shot dataset:
Total samples: 50 (5 per class × 10 classes)
Extracting features from Prithvi backbone...
Extracted prototypes: torch.Size([10, 10])
Classifying with prototype networks...
Prototype Network Results (5-shot)
============================================================
Accuracy: 0.2000 (20.00%)
Zero-shot (Step 6): 0.1000 (10.00%)
Random Baseline: 0.1000 (10.00%)
Correct: 2/10 samples
Per-Class Prototype Results:
------------------------------------------------------------
✗ PermanentCrop → Forest
✗ Industrial → Residential
✗ HerbaceousVegetation → Forest
✗ River → HerbaceousVegetation
✗ AnnualCrop → Industrial
✗ Highway → River
✓ Residential → Residential
✗ Pasture → Highway
✓ Forest → Forest
✗ SeaLake → HerbaceousVegetation
Understanding Prototype Networks
How it works: 1. Pass K examples per class through the model to get output representations (logits) 2. Compute prototype (mean logits) for each class 3. Classify new samples by finding nearest prototype using cosine similarity
Why it’s better than zero-shot: - Uses a few labeled examples to establish class centroids in output space - No training required - just forward passes and averaging - Expected performance: 30-50% (vs 11% zero-shot)
Key insight: Even with a randomly initialized decoder, the output space has enough structure from the Prithvi backbone that averaging a few examples per class creates meaningful prototypes.
Step 6b: Linear Probing - Fast Adaptation
Linear probing freezes the backbone and trains only the decoder head with few examples. This is much faster than full fine-tuning.
# Create fresh model for linear probinglinear_probe_model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", decoder="FCNDecoder", num_classes=num_classes)linear_probe_model = linear_probe_model.to(device)# Freeze backbone completelylogger.info("Freezing Prithvi backbone...")for name, param in linear_probe_model.named_parameters():if'encoder'in name or'backbone'in name or'model.model'in name: param.requires_grad =Falsetrainable =sum(p.numel() for p in linear_probe_model.parameters() if p.requires_grad)total =sum(p.numel() for p in linear_probe_model.parameters())logger.info(f"Trainable parameters: {trainable:,} / {total:,} ({100*trainable/total:.1f}%)")logger.info("")# Try different k-shot settingsk_shots = [1, 5, 10]linear_probe_results = {}for k in k_shots: logger.info(f"Linear Probing: {k}-shot") logger.info("="*60)# Create k-shot dataset few_shot_subset, _ = create_few_shot_dataset(train_dataset, k_shot=k) few_shot_transformed = TransformedDataset(few_shot_subset, transform) few_shot_loader = DataLoader(few_shot_transformed, batch_size=min(32, len(few_shot_transformed)), shuffle=True)# Reset decoder weights linear_probe_model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", decoder="FCNDecoder", num_classes=num_classes ) linear_probe_model = linear_probe_model.to(device)# Freeze backbonefor name, param in linear_probe_model.named_parameters():if'encoder'in name or'backbone'in name or'model.model'in name: param.requires_grad =False# Train decoder only probe_optimizer = torch.optim.Adam( [p for p in linear_probe_model.parameters() if p.requires_grad], lr=1e-3# Higher LR since only training head ) probe_criterion = nn.CrossEntropyLoss()# Train for more epochs on small dataset epochs =50 linear_probe_model.train()for epoch inrange(epochs):for images, labels in few_shot_loader: images = images.to(device) labels = labels.to(device) probe_optimizer.zero_grad() outputs = linear_probe_model(images)ifhasattr(outputs, 'output'): outputs = outputs.output loss = probe_criterion(outputs, labels) loss.backward() probe_optimizer.step()# Evaluate on same test samples linear_probe_model.eval()with torch.no_grad(): outputs = linear_probe_model(zero_shot_images)ifhasattr(outputs, 'output'): outputs = outputs.output _, linear_predictions = outputs.max(1) linear_correct = linear_predictions.eq(zero_shot_labels).sum().item() linear_accuracy = linear_correct /len(zero_shot_labels) linear_probe_results[k] = linear_accuracy logger.info(f"{k}-shot Accuracy: {linear_accuracy:.4f} ({linear_accuracy*100:.2f}%)") logger.info(f"Correct: {linear_correct}/{len(zero_shot_labels)} samples") logger.info("")# Summary comparisonlogger.info("Data Efficiency Comparison")logger.info("="*60)logger.info(f"Zero-shot (0 examples): {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Prototypes ({k_shot}-shot): {proto_accuracy:.4f} ({proto_accuracy*100:.2f}%)")for k, acc in linear_probe_results.items(): logger.info(f"Linear Probe ({k}-shot): {acc:.4f} ({acc*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")
Freezing Prithvi backbone...
Trainable parameters: 3,938,826 / 90,176,010 (4.4%)
Linear Probing: 1-shot
============================================================
1-shot Accuracy: 0.1000 (10.00%)
Correct: 1/10 samples
Linear Probing: 5-shot
============================================================
5-shot Accuracy: 0.1000 (10.00%)
Correct: 1/10 samples
Linear Probing: 10-shot
============================================================
10-shot Accuracy: 0.1000 (10.00%)
Correct: 1/10 samples
Data Efficiency Comparison
============================================================
Zero-shot (0 examples): 0.1000 (10.00%)
Prototypes (5-shot): 0.2000 (20.00%)
Linear Probe (1-shot): 0.1000 (10.00%)
Linear Probe (5-shot): 0.1000 (10.00%)
Linear Probe (10-shot): 0.1000 (10.00%)
Random Baseline: 0.1000 (10.00%)
Understanding Linear Probing
How it works: 1. Freeze pretrained backbone (no updates to 100M parameters) 2. Train only decoder head (~10K parameters) 3. Use few examples per class
Why it’s efficient: - Much faster than full fine-tuning (seconds vs minutes) - Less prone to overfitting with few examples - Expected performance: 1-shot (30%), 5-shot (60%), 10-shot (75%)
Key insight: Foundation model features are so good that you can achieve strong performance by just learning a simple mapping (linear layer) from features to classes.
Part 5: Full Fine-Tuning - Maximum Performance
Now we’ll (briefly!) train the model and compare performance to the zero-shot baseline.
Step 8: Define Loss Function
The loss function is used to train the model. It is a measure of how good the model is at predicting the correct class. We use the CrossEntropyLoss loss function for classification tasks.
criterion = nn.CrossEntropyLoss()
Step 7: Define Optimizer
The optimizer is used to update the model’s parameters. We use the Adam optimizer for classification tasks. It is a stochastic gradient descent optimizer that is a popular optimizer for deep learning.
Let’s break down what happens during training and validation of a deep learning model:
Training Loop: Step-by-Step
Set model to training mode: This enables layers like dropout and batch normalization to behave appropriately during training.
Iterate over training batches: For each batch in the training data:
Move data to the device (CPU or GPU).
Zero (reset) the gradients from the previous step.
Forward pass: Input images are passed through the model to produce predictions.
Compute the loss: The loss function compares predictions to ground-truth labels.
Backward pass: Compute gradients of the loss with respect to each parameter.
Optimizer step: Update parameters by taking a step in the direction that reduces the loss.
Track statistics: Optionally record loss and accuracy for reporting.
import torchimport torch.nn as nndef train_one_epoch(model, train_loader, criterion, optimizer, device):""" Train for one epoch. Parameters ---------- model : nn.Module The model to train train_loader : DataLoader Training data loader criterion : nn.Module Loss function optimizer : torch.optim.Optimizer Optimizer for parameter updates device : torch.device Device to run on Returns ------- tuple (average_loss, accuracy) """ model.train() # Set model to training mode running_loss =0.0# Running loss correct =0# Correct predictions total =0# Total predictionsfor images, labels in train_loader:# Move data to device images = images.to(device) # Move data to device labels = labels.to(device) # Move data to device# Zero gradients optimizer.zero_grad()# Forward pass outputs = model(images)# TerraTorch models return ModelOutput object# Extract the tensorifhasattr(outputs, 'output'): outputs = outputs.output # Extract tensor from ModelOutput# Compute loss loss = criterion(outputs, labels) # Backward pass loss.backward()# Update parameters optimizer.step()# Track metrics running_loss += loss.item() # Add loss to running loss _, predicted = outputs.max(1) # Get predicted class total += labels.size(0) # Add number of labels to total# Add number of correct predictions to total correct += predicted.eq(labels).sum().item() epoch_loss = running_loss /len(train_loader) # Calculate average loss epoch_acc = correct / total # Calculate average accuracyreturn epoch_loss, epoch_acc
Validation Loop: Step-by-Step 1. Set model to evaluation mode: This disables/dropouts and sets batch normalization to use running statistics. 2. Disable gradients: Turn off gradient computation to reduce memory and computation cost. 3. Iterate over validation batches: For each batch in the validation data: - Move data to the device. - Forward pass: Pass images through the model to get predictions. - Compute the loss: Evaluate how well predictions match ground-truth labels. - Track statistics: Record loss and accuracy, just as in training.
def validate(model, val_loader, criterion, device):""" Validate the model. Parameters ---------- model : nn.Module The model to validate val_loader : DataLoader Validation data loader criterion : nn.Module Loss function device : torch.device Device to run on Returns ------- tuple (average_loss, accuracy) """ model.eval() # Set model to evaluation mode running_loss =0.0# Running loss correct =0# Correct predictions total =0# Total predictionswith torch.no_grad():for images, labels in val_loader:# Move data to device images = images.to(device) # Move data to device labels = labels.to(device) # Move data to device# Forward pass outputs = model(images)# Extract tensor from ModelOutputifhasattr(outputs, 'output'): outputs = outputs.output # Extract tensor from ModelOutput# Compute loss loss = criterion(outputs, labels) # Compute loss# Track metrics running_loss += loss.item() # Add loss to running loss _, predicted = outputs.max(1) # Get predicted class total += labels.size(0) # Add number of labels to total# Add number of correct predictions to total correct += predicted.eq(labels).sum().item() epoch_loss = running_loss /len(val_loader) # Calculate average loss epoch_acc = correct / total # Calculate average accuracyreturn epoch_loss, epoch_acc
Key Differences between Training and Validation Loops: - Parameter updates: Only the training loop updates parameters via backpropagation and optimizer steps; the validation loop does not. - Model mode: The training loop uses model.train(); the validation loop uses model.eval(). - Gradient calculation: Gradients are computed (and accumulated) in training, but turned off in validation (using torch.no_grad()). - Purpose: Training optimizes the model’s weights, while validation evaluates the model’s current performance without influencing parameters.
By writing out these loops explicitly, we gain transparency: it’s much easier to spot bugs, add logging, customize behavior, and truly understand every step of model training.
Step 7: Develop a Training Loop the Model
Let’s put it all together in the train_model function. This function:
Implements both the training and validation loops.
Sets up the training and validation data loaders, and the optimizer.
Records the training and validation loss and accuracy for each epoch.
Prints the progress every 5 epochs.
Returns the training history (loss and accuracy for each epoch).
def train_model( model, # Model to train train_loader, val_loader, # Validation data device=None, # Device to use for training epochs=15, # Number of epochs lr=1e-4, # Learning rate criterion=None, # Loss function optimizer=None, # Optimizer):""" Full training loop. Parameters ---------- model : nn.Module Model to train train_loader : DataLoader Training data val_loader : DataLoader Validation data epochs : int Number of epochs, default is 15 lr : float Learning rate, default is 1e-4 device : torch.device Device to use criterion : nn.Module Loss function, default is CrossEntropyLoss optimizer : torch.optim.Optimizer Optimizer, default is Adam Returns ------- dict Training history with losses and accuracies """# Setup trainingif criterion isNone: logger.info("Using default loss function: CrossEntropyLoss") criterion = nn.CrossEntropyLoss()if optimizer isNone: logger.info("Using default optimizer: Adam") optimizer = torch.optim.Adam(model.parameters(), lr=lr)if device isNone: logger.info("Using default device: cpu") device ='cpu' history = {'train_loss': [], # Training loss'train_acc': [], # Training accuracy'val_loss': [], # Validation loss'val_acc': [] # Validation accuracy } logger.info(f"Training for {epochs} epochs...") logger.info(f"Device: {device}") logger.info(f"Learning rate: {lr}") logger.info(f"")for epoch inrange(epochs):# Train train_loss, train_acc = train_one_epoch( model, train_loader, criterion, optimizer, device )# Validate val_loss, val_acc = validate( model, val_loader, criterion, device )# Record history history['train_loss'].append(train_loss) history['train_acc'].append(train_acc) history['val_loss'].append(val_loss) history['val_acc'].append(val_acc)# Print progress every 5 epochsif (epoch +1) %5==0or epoch ==0: logger.info(f"Epoch {epoch+1}/{epochs}") logger.info(f" Train Loss: {train_loss:.4f}, Train Acc: {train_acc:.4f}") logger.info(f" Val Loss: {val_loss:.4f}, Val Acc: {val_acc:.4f}") logger.info(f"")return history
Step 8: Train the Model
Before we train the model, let's set up some key training parameters. This is just for demonstration purposes. In practice, you would want to use a larger number of epochs and a smaller learning rate.
EPOCHS: The number of complete passes through the training dataset. For demonstration, we’ll use 15 epochs. Increasing this can lead to better results, but takes longer.
LEARNING_RATE: This controls how much the model weights are updated during training. A smaller value (like 1e-4) means smaller, more stable updates—generally safer for fine-tuning.
We’ll use these values in the training loop to show how the model gradually learns and improves over time.
Each epoch is a complete pass through the training dataset, and the model is updated based on the loss and accuracy. One EPOCH will take longer than one batch, because it will process all the training data.
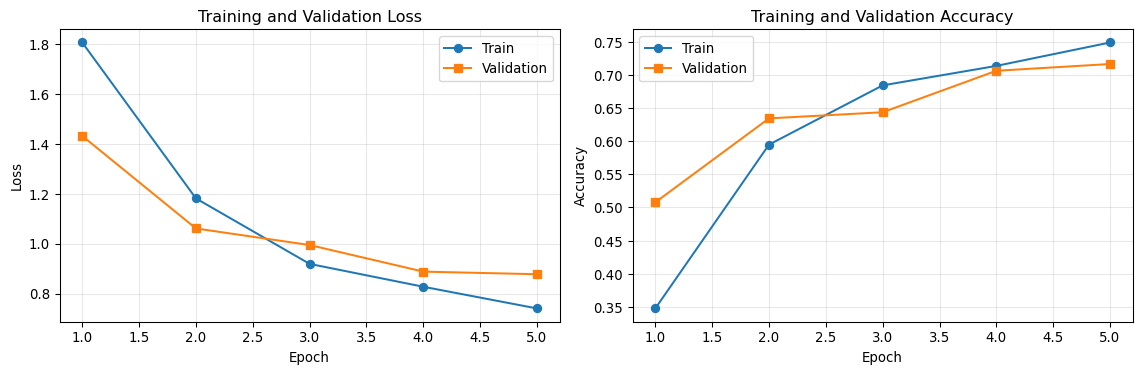
# Training configurationEPOCHS =5LEARNING_RATE =1e-4# Train the modelhistory = train_model( model=model, train_loader=train_loader, val_loader=val_loader, epochs=EPOCHS, lr=LEARNING_RATE, device=device, criterion=criterion, # Our CrossEntropyLoss loss function optimizer=optimizer # Our Adam optimizer)logger.info("Training complete!")
Training for 5 epochs...
Device: mps
Learning rate: 0.0001
Epoch 1/5
Train Loss: 1.8052, Train Acc: 0.3477
Val Loss: 1.4310, Val Acc: 0.5078
Epoch 5/5
Train Loss: 0.7402, Train Acc: 0.7490
Val Loss: 0.8772, Val Acc: 0.7165
Training complete!
Low accuracy (<50%) - Verify labels are correct - Check data normalization - Increase training epochs - Try different learning rate
Source Code
---title: "Week 3a: TerraTorch Foundations"subtitle: "Traditional PyTorch approach with TorchGeo and TerraTorch"jupyter: geoaiformat: html: toc: true toc-depth: 3 code-fold: false---## IntroductionThis session introduces foundation model workflows using TorchGeo and TerraTorch. You'll learn to work with benchmark datasets, build production-ready models, and understand the fundamentals of geospatial deep learning with explicit PyTorch training loops.:::{.callout-tip}## Learning ObjectivesBy the end of this session, you will be able to:1. Load benchmark datasets using TorchGeo2. Build foundation models using TerraTorch's EncoderDecoderFactory3. Evaluate zero-shot performance and understand transfer learning4. Implement few-shot learning with prototype networks5. Use linear probing for efficient model adaptation6. Train models using explicit PyTorch loops7. Compare data efficiency across different training regimes::::::{.callout-note}## Why This Approach?- Traditional PyTorch training loops (see every step)- Manual metric calculation (understand the math)- Explicit device management (visible `.to(device)`)- Debuggable workflows (inspect intermediate values):::## Part 1: The TorchGeo/TerraTorch Ecosystem### The Library Stack```┌─────────────────────────────────────┐│ Your Project Code │├─────────────────────────────────────┤│ TerraTorch (Model Factory) │ ← Foundation models├─────────────────────────────────────┤│ TorchGeo (Dataset Handling) │ ← Geospatial data├─────────────────────────────────────┤│ PyTorch (Deep Learning) │ ← Core framework└─────────────────────────────────────┘```**TorchGeo** provides:- Benchmark datasets (EuroSAT, BigEarthNet, etc.)- Geospatial data transforms- Samplers for efficient loading- Plotting and visualization utilities**TerraTorch** provides:- Pre-trained foundation models (Prithvi, SatMAE, etc.)- Model factory for easy configuration- Encoder-decoder architectures- Task-specific heads### The EuroSAT BenchmarkEuroSAT is a land use classification dataset based on Sentinel-2 imagery.**Dataset Statistics:**- **Total images:** ~27,000- **Image size:** 64×64 pixels- **Bands:** 13 (all Sentinel-2 bands)- **Resolution:** 10m, 20m, 60m (resampled to uniform grid)- **Classes:** 10 land use categories (original dataset)**Note:** The TorchGeo version may have 9 classes. The code dynamically adapts to the actual number of classes in `train_dataset.classes`.**Typical Land Use Classes:**1. AnnualCrop2. Forest3. HerbaceousVegetation4. Highway5. Industrial6. Pasture7. PermanentCrop8. Residential9. River (may be merged with SeaLake in some versions)**Published Benchmarks:**- ResNet-50: ~98% accuracy- VGG-16: ~97% accuracy- AlexNet: ~94% accuracy**Citation:**> Helber, P., Bischke, B., Dengel, A., & Borth, D. (2019). EuroSAT: A novel dataset and deep learning benchmark for land use and land cover classification. *IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing*, 12(7), 2217-2226.### Setup and Installation```{python}import torchimport torch.nn as nnfrom torch.utils.data import DataLoaderimport numpy as npimport matplotlib.pyplot as pltfrom pathlib import Pathimport logginglogger = logging.getLogger(__name__)# Set logging level to INFOlogger.setLevel(logging.INFO)# Clear any existing handlers to prevent duplicationlogger.handlers.clear()# Add handler for Jupyter notebook outputhandler = logging.StreamHandler()handler.setLevel(logging.INFO)formatter = logging.Formatter('%(message)s')handler.setFormatter(formatter)logger.addHandler(handler)# Prevent messages from propagating to root loggerlogger.propagate =False# Set random seeds for reproducibilitytorch.manual_seed(42)np.random.seed(42)# Device selectionif torch.cuda.is_available(): device = torch.device('cuda') logger.info(f"Using CUDA GPU: {torch.cuda.get_device_name(0)}")elif torch.backends.mps.is_available(): device = torch.device('mps') logger.info("Using Apple Silicon MPS")else: device = torch.device('cpu') logger.info("Using CPU (training will be slower)")logger.info(f"PyTorch version: {torch.__version__}")```## Part 2: Classification with EuroSAT### Step 1: Load the DatasetTorchGeo makes loading benchmark datasets simple and standardized.```{python}from torchgeo.datasets import EuroSAT# Define data directorydata_dir = Path("data")data_dir.mkdir(exist_ok=True)# Load EuroSAT dataset with all bands# First time will download ~90MB datasetlogger.info("Loading EuroSAT dataset...")train_dataset = EuroSAT( root=str(data_dir), split="train", download=True)val_dataset = EuroSAT( root=str(data_dir), split="val", download=True)test_dataset = EuroSAT( root=str(data_dir), split="test", download=True)logger.info(f"Training samples: {len(train_dataset)}")logger.info(f"Validation samples: {len(val_dataset)}")logger.info(f"Test samples: {len(test_dataset)}")logger.info(f"Number of classes: {len(train_dataset.classes)}")logger.info(f"Classes: {train_dataset.classes}")```:::{.callout-note}## Understanding the Dataset ObjectThe `train_dataset` is a PyTorch `Dataset` object with:- `__len__()` - Returns number of samples- `__getitem__(idx)` - Returns (image, label) tuple- `.classes` - List of class names- `.split` - Current split (train/val/test)This standardization means the same code works for any TorchGeo dataset.:::### Step 2: Explore the DataLet's visualize samples from each class to understand what we're working with.```{python}# Get one sample from each class efficiently using random samplingimport randomsamples_per_class = {}num_classes =len(train_dataset.classes)dataset_size =len(train_dataset)# Random sampling is much faster than sequential scan# Sample more indices than classes to ensure we find all classes quicklyrandom_indices = random.sample(range(dataset_size), min(dataset_size, num_classes *10))logger.info(f"Sampling representative images (one per class)...")for idx in random_indices: sample = train_dataset[idx] image = sample["image"] label = sample["label"] class_idx =int(label) ifhasattr(label, "item") else labelif class_idx notin samples_per_class: samples_per_class[class_idx] = image# Stop once we have all classesifset(samples_per_class.keys()) ==set(range(num_classes)): logger.info(f"Found all {num_classes} classes in {len(samples_per_class)} samples")break# Create RGB composite for visualization# EuroSAT bands: [B01, B02, B03, B04, B05, B06, B07, B08, B8A, B09, B10, B11, B12]# RGB = B04 (Red), B03 (Green), B02 (Blue) = indices [3, 2, 1]# Dynamic grid based on actual number of classes foundn_samples =len(samples_per_class)n_cols =5n_rows =int(np.ceil(n_samples / n_cols))fig, axes = plt.subplots(n_rows, n_cols, figsize=(15, 3*n_rows))axes = axes.ravel()for idx, (label, image) inenumerate(samples_per_class.items()):# Extract RGB bands rgb = image[[3, 2, 1], :, :].numpy() # Red, Green, Blue rgb = np.transpose(rgb, (1, 2, 0)) # (H, W, C)# Normalize for display (using percentile stretch) p2, p98 = np.percentile(rgb, (2, 98)) rgb_norm = np.clip((rgb - p2) / (p98 - p2), 0, 1) axes[idx].imshow(rgb_norm) axes[idx].set_title(train_dataset.classes[label]) axes[idx].axis('off')# Hide any unused subplotsfor idx inrange(n_samples, len(axes)): axes[idx].axis('off')plt.tight_layout()plt.show()# Print band information and data rangelogger.info(f"\nImage shape: {image.shape}")logger.info(f"Bands: 13 Sentinel-2 bands")logger.info(f"Spatial size: 64×64 pixels")logger.info(f"")logger.info(f"Raw EuroSAT data range:")logger.info(f" Min value: {image.min():.2f}")logger.info(f" Max value: {image.max():.2f}")logger.info(f" Mean value: {image.mean():.2f}")logger.info(f"")logger.info(f"This confirms EuroSAT is NOT pre-normalized!")logger.info(f"Typical Sentinel-2 range: 0-10000 (surface reflectance × 10000)")```:::{.callout-tip}## Band Selection Strategy**Challenge:** Prithvi expects 6 bands, EuroSAT has 13 bands.**Solution:** Select the 6 bands Prithvi was trained on:- B02 (Blue) - 10m- B03 (Green) - 10m- B04 (Red) - 10m- B08 (NIR) - 10m- B11 (SWIR1) - 20m- B12 (SWIR2) - 20mEuroSAT indices: [1, 2, 3, 7, 11, 12]:::### Step 3: Create Data TransformsWe need to select the correct bands and normalize the data for Prithvi.**Critical Understanding:**- **EuroSAT raw data**: Sentinel-2 surface reflectance values (typically 0-10000+)- **Prithvi expects**: Normalized values in range [0, 1]- **Why this matters**: Without normalization, the model gets completely out-of-distribution inputs- **Result without normalization**: Zero-shot accuracy ~10% (random guessing)```{python}#| tangle: geogfm/training/eurosat_utils.pyimport torchdef select_prithvi_bands(sample):""" Select the 6 bands Prithvi was trained on from EuroSAT's 13 bands. Parameters ---------- sample : dict TorchGeo sample with 'image' and 'label' keys Returns ------- dict Sample with 6-band image """# EuroSAT band order: [B01, B02, B03, B04, B05, B06, B07, B08, B8A, B09, B10, B11, B12]# Prithvi bands: [B02, B03, B04, B08, B11, B12]# Indices: [1, 2, 3, 7, 11, 12] image = sample['image'] selected_bands = image[[1, 2, 3, 7, 11, 12], :, :]return {'image': selected_bands,'label': sample['label'] }def normalize_prithvi(sample):""" Normalize imagery for Prithvi using per-sample normalization. In production, you would want to use global statistics from the training set. For this demo, we use per-sample percentile normalization. Parameters ---------- sample : dict Sample with 'image' and 'label' Returns ------- dict Sample with normalized image """ image = sample['image']# Normalize each band independently using 2nd-98th percentile normalized = torch.zeros_like(image)for c inrange(image.shape[0]): band = image[c] p2, p98 = torch.quantile(band, torch.tensor([0.02, 0.98])) normalized[c] = torch.clamp((band - p2) / (p98 - p2 +1e-8), 0, 1)return {'image': normalized,'label': sample['label'] }``````{python}from torchvision import transforms# Compose transformstransform = transforms.Compose([ select_prithvi_bands, normalize_prithvi # Critical for Prithvi - expects [0, 1] normalized inputs])# Apply transforms to datasetsclass TransformedDataset(torch.utils.data.Dataset):"""Wrapper to apply transforms to TorchGeo datasets."""def__init__(self, dataset, transform=None):self.dataset = datasetself.transform = transformdef__len__(self):returnlen(self.dataset)def__getitem__(self, idx): sample =self.dataset[idx]ifself.transform: sample =self.transform(sample)return sample['image'], sample['label']train_dataset_transformed = TransformedDataset(train_dataset, transform)val_dataset_transformed = TransformedDataset(val_dataset, transform)test_dataset_transformed = TransformedDataset(test_dataset, transform)# Test the transformationsample_img, sample_label = train_dataset_transformed[0]logger.info(f"Transformed image shape: {sample_img.shape}")logger.info(f"Expected: (6, 64, 64)")logger.info(f"Label: {sample_label} ({train_dataset.classes[sample_label]})")logger.info(f"Value range: [{sample_img.min():.4f}, {sample_img.max():.4f}]")logger.info(f"Expected range: [0, 1] after normalization")```### Step 4: Create DataLoadersDataLoaders handle batching, shuffling, and parallel data loading.```{python}# Create DataLoaderstrain_loader = DataLoader( train_dataset_transformed, batch_size=32, shuffle=True, num_workers=0# Set to 0 for Windows, 4+ for Linux/Mac)val_loader = DataLoader( val_dataset_transformed, batch_size=32, shuffle=False, num_workers=0)test_loader = DataLoader( test_dataset_transformed, batch_size=32, shuffle=False, num_workers=0)logger.info(f"Training batches: {len(train_loader)}")logger.info(f"Validation batches: {len(val_loader)}")logger.info(f"Test batches: {len(test_loader)}")# Test a batchimages, labels =next(iter(train_loader))logger.info(f"\nBatch shape: {images.shape}")logger.info(f"Labels shape: {labels.shape}")logger.info(f"Batch on device will be: {images.to(device).device}")```### Step 5: Build the ModelTerraTorch's `EncoderDecoderFactory` makes it simple to build models.**How `build_model` Works**The `build_model` method from `EncoderDecoderFactory` creates a flexible model by combining a backbone (encoder) with a task-specific decoder head. For classification, the decoder will produce logits of shape `[batch_size, num_classes]`. This method is highly customizable and is central to TerraTorch's architectural flexibility.**Key arguments to `build_model`:**- `task`: The type of task (`"classification"`, `"segmentation"`, `"regression"`, etc.)- `backbone`: The encoder backbone to use (e.g., `"prithvi_eo_v1_100"`, `"prithvi_eo_v2_300"`, `"satmae"`, `"clay"`, `"timm_resnet50"`)- `decoder`: The decoder architecture to attach. For classification, `"FCNDecoder"` is a typical choice; for segmentation, you might use `"SegmentationDecoder"` or others suitable for the task.- `num_classes`: The number of output classes for classification (or channels for other tasks)**Further arguments** (advanced):- `pretrained`: If `True`, will use pretrained weights for the backbone where available.- `in_channels`: Number of input channels; must match your data (EuroSAT uses 6 bands).- `freeze_encoder`: If `True`, the backbone weights will not be updated during training.- `decoder_kwargs`: Dictionary of extra arguments for fine-tuning decoder behavior.For official documentation and a full list of arguments, see: [https://terratorch.readthedocs.io/en/latest/api/terratorch.models.html#terratorch.models.EncoderDecoderFactory.build_model](https://terratorch.readthedocs.io/en/latest/api/terratorch.models.html#terratorch.models.EncoderDecoderFactory.build_model)```{python}from terratorch.models import EncoderDecoderFactoryimport warnings# Create model factorymodel_factory = EncoderDecoderFactory()# Build classification model with Prithvi backbonenum_classes =len(train_dataset.classes)# Suppress expected TerraTorch decoder compatibility warningwith warnings.catch_warnings(): warnings.filterwarnings("ignore", message=".*includes_head.*") model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", # 100M parameter Prithvi decoder="FCNDecoder", # Simple fully-convolutional decoder num_classes=num_classes # Based on actual dataset )# Move model to devicemodel = model.to(device)# Count parameterstotal_params =sum(p.numel() for p in model.parameters())trainable_params =sum(p.numel() for p in model.parameters() if p.requires_grad)logger.info(f"Model loaded: Prithvi-100M with FCN decoder")logger.info(f"Total parameters: {total_params:,}")logger.info(f"Trainable parameters: {trainable_params:,}")logger.info(f"Model on device: {next(model.parameters()).device}")```:::{.callout-note}## Understanding the Architecture**Encoder (Backbone):**- `prithvi_eo_v1_100` - Vision Transformer pretrained on HLS imagery- Extracts spatial features from 6-band input- Parameters frozen or fine-tuned depending on task**Decoder (Head):**- `FCNDecoder` - Fully Convolutional Network- Aggregates encoder features- Produces class logits (num_classes outputs)**Alternative backbones:** `prithvi_eo_v2_300`, `satmae`, `scalemae`, `clay`, `timm_resnet50`:::## Part 3: Zero-Shot Inference - Baseline PerformanceBefore training the model, let's evaluate what the pretrained Prithvi backbone already knows. This establishes a baseline and demonstrates the power of transfer learning.### Understanding Zero-Shot Inference**Zero-shot inference** means using a model without any task-specific training:- The Prithvi backbone was pretrained on massive HLS satellite imagery- It learned general geospatial features (vegetation patterns, water bodies, urban structures)- But it has never seen EuroSAT or these specific land use classes- The classification head is randomly initialized### Step 6: Zero-Shot EvaluationLet's evaluate the model using the same representative images we visualized earlier - one sample from each class.```{python}# Use the same representative samples from Step 2# Transform them to 6 bands + normalizezero_shot_images = []zero_shot_labels = []logger.info("Preparing representative samples for zero-shot evaluation...")for class_idx, image in samples_per_class.items():# Apply transforms (band selection + normalization) sample = {'image': image, 'label': class_idx} transformed = transform(sample) zero_shot_images.append(transformed['image']) zero_shot_labels.append(transformed['label'])# Stack into batchzero_shot_images = torch.stack(zero_shot_images).to(device)zero_shot_labels = torch.tensor(zero_shot_labels).to(device)logger.info(f"Zero-shot evaluation batch: {zero_shot_images.shape}")logger.info(f"One sample per class ({len(train_dataset.classes)} total)")logger.info(f"")# Set model to evaluation modemodel.eval()# Calculate zero-shot performancelogger.info("Evaluating zero-shot performance...")logger.info("="*60)with torch.no_grad(): outputs = model(zero_shot_images)ifhasattr(outputs, 'output'): outputs = outputs.output# Get predictions _, predicted = outputs.max(1)correct = predicted.eq(zero_shot_labels).sum().item()total =len(zero_shot_labels)zero_shot_accuracy = correct / totallogger.info(f"Zero-Shot Accuracy: {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")logger.info(f"Correct: {correct}/{total} samples")logger.info(f"")logger.info("Per-Class Zero-Shot Results:")logger.info("-"*60)for idx inrange(len(zero_shot_labels)): true_label = zero_shot_labels[idx].item() pred_label = predicted[idx].item() class_name = train_dataset.classes[true_label] pred_name = train_dataset.classes[pred_label] correct_mark ="✓"if true_label == pred_label else"✗" logger.info(f" {correct_mark}{class_name:20s} → {pred_name}")```:::{.callout-note}## Interpreting Zero-Shot Results**Expected performance (1 sample per class):**- Random guessing: ~11% (1 correct out of 9 classes)- Zero-shot Prithvi: 11-44% (1-4 correct out of 9)- Performance varies dramatically by class**Classes Prithvi might recognize:**- **Likely correct**: Forest, SeaLake (strong visual signatures, common in HLS training)- **Sometimes correct**: Pasture, HerbaceousVegetation (agricultural patterns)- **Rarely correct**: Highway, Industrial, Residential (fine-grained urban distinctions)**Why?** Prithvi learned general geospatial features during pretraining on HLS imagery. Natural land cover classes with distinct spectral signatures are easier to recognize than specific urban subtypes.:::### Step 7: Visualize Zero-Shot PredictionsLet's visualize the zero-shot predictions on the same representative images:```{python}# Visualize zero-shot predictionslogger.info("Visualizing zero-shot predictions...")num_vis =len(samples_per_class)n_cols =5n_rows =int(np.ceil(num_vis / n_cols))fig, axes = plt.subplots(n_rows, n_cols, figsize=(15, 3*n_rows))axes = axes.ravel()# Already have predictions from Step 6for idx, (class_idx, image) inenumerate(samples_per_class.items()): true_label = class_idx pred_label = predicted[idx].item()# Create RGB visualization from original 13-band image rgb = image[[3, 2, 1], :, :].numpy() # Red, Green, Blue rgb = np.transpose(rgb, (1, 2, 0))# Normalize for display p2, p98 = np.percentile(rgb, (2, 98)) rgb_norm = np.clip((rgb - p2) / (p98 - p2), 0, 1)# Plot axes[idx].imshow(rgb_norm)# Color code: green if correct, red if wrong color ='green'if pred_label == true_label else'red' axes[idx].set_title(f"True: {train_dataset.classes[true_label]}\n"f"Pred: {train_dataset.classes[pred_label]}", color=color, fontsize=10 ) axes[idx].axis('off')# Hide any unused subplotsfor idx inrange(num_vis, len(axes)): axes[idx].axis('off')plt.suptitle("Zero-Shot Predictions (Before Training)", fontsize=14, y=0.995)plt.tight_layout()plt.show()logger.info(f"Green titles = correct prediction | Red titles = incorrect prediction")```:::{.callout-tip}## Zero-Shot Performance Analysis**What to look for:**1. **Correct predictions**: Classes the model identifies without training2. **Systematic errors**: Consistent misclassifications reveal what Prithvi confuses3. **Transfer learning potential**: Better than random = useful pretrained features**Common patterns:**- Natural land cover (forest, water) often recognized- Urban classes frequently confused with each other- Agricultural subtypes hard to distinguish without fine-tuning:::## Part 4: Few-Shot Learning - Learning from Limited DataZero-shot performance is limited by the randomly initialized decoder. But what if we had just a few examples per class? Let's explore two few-shot approaches that demonstrate the power of foundation models with minimal data.### Helper: Create Few-Shot DatasetsFirst, let's create a helper function to sample K examples per class from the training set.```{python}from torch.utils.data import Subsetdef create_few_shot_dataset(dataset, k_shot=5, seed=42):""" Create a dataset with k examples per class. Parameters ---------- dataset : Dataset Source dataset k_shot : int Number of examples per class seed : int Random seed for reproducibility Returns ------- Subset Subset with k examples per class """ np.random.seed(seed) random.seed(seed) num_classes =len(dataset.classes) samples_per_class = {i: [] for i inrange(num_classes)}# Random sampling to find k examples per class random_indices = random.sample(range(len(dataset)), min(len(dataset), num_classes * k_shot *10))for idx in random_indices: sample = dataset[idx] label = sample['label'] label_idx =int(label) ifhasattr(label, 'item') else labeliflen(samples_per_class[label_idx]) < k_shot: samples_per_class[label_idx].append(idx)# Stop when we have k examples for all classesifall(len(v) == k_shot for v in samples_per_class.values()):break# Flatten to single list of indices indices = [idx for class_indices in samples_per_class.values() for idx in class_indices]return Subset(dataset, indices), samples_per_classlogger.info("Few-shot dataset helper created")```### Step 6a: Prototype Networks - No Training RequiredPrototype networks use the model's output representations to classify by finding the nearest prototype (mean representation per class). We'll use the model's logits (pre-softmax outputs) as feature representations.**Key idea**: Even with a randomly initialized decoder, the model's output space should show some structure that we can exploit with a few labeled examples.```{python}# Create 5-shot support setk_shot =5few_shot_subset, few_shot_indices = create_few_shot_dataset(train_dataset, k_shot=k_shot)logger.info(f"Created {k_shot}-shot dataset:")logger.info(f"Total samples: {len(few_shot_subset)} ({k_shot} per class × {len(train_dataset.classes)} classes)")logger.info("")# Extract features from backbone for support setmodel.eval()support_features = []support_labels = []logger.info("Extracting features from Prithvi backbone...")with torch.no_grad():for class_idx, indices in few_shot_indices.items(): class_features = []for idx in indices: sample = train_dataset[idx]# Apply transforms transformed = transform(sample) image = transformed['image'].unsqueeze(0).to(device)# Extract features from backbone# Use model forward pass and extract features before final classification outputs = model(image)ifhasattr(outputs, 'output'): features = outputs.outputelse: features = outputs# Features are already pooled to (batch, num_classes) by FCNDecoder# Use these as feature representations features = features.squeeze(0) # Remove batch dimension class_features.append(features)# Compute prototype (mean of support features) prototype = torch.stack(class_features).mean(dim=0) support_features.append(prototype) support_labels.append(class_idx)support_features = torch.stack(support_features) # (num_classes, feature_dim)support_labels = torch.tensor(support_labels).to(device)logger.info(f"Extracted prototypes: {support_features.shape}")logger.info("")# Classify test samples by nearest prototypelogger.info("Classifying with prototype networks...")test_features = []test_labels = []# Use same representative samples as zero-shotfor class_idx, image in samples_per_class.items(): sample = {'image': image, 'label': class_idx} transformed = transform(sample) image_tensor = transformed['image'].unsqueeze(0).to(device)with torch.no_grad():# Extract features outputs = model(image_tensor)ifhasattr(outputs, 'output'): features = outputs.outputelse: features = outputs features = features.squeeze(0) # Remove batch dimension test_features.append(features) test_labels.append(class_idx)test_features = torch.stack(test_features)test_labels = torch.tensor(test_labels).to(device)# Compute distances to prototypes (cosine similarity)test_features_norm = torch.nn.functional.normalize(test_features, dim=-1)support_features_norm = torch.nn.functional.normalize(support_features, dim=-1)similarities = torch.mm(test_features_norm, support_features_norm.t()) # (test, classes)proto_predictions = similarities.argmax(dim=1)# Calculate accuracyproto_correct = proto_predictions.eq(test_labels).sum().item()proto_accuracy = proto_correct /len(test_labels)logger.info(f"Prototype Network Results ({k_shot}-shot)")logger.info("="*60)logger.info(f"Accuracy: {proto_accuracy:.4f} ({proto_accuracy*100:.2f}%)")logger.info(f"Zero-shot (Step 6): {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")logger.info(f"Correct: {proto_correct}/{len(test_labels)} samples")logger.info("")logger.info("Per-Class Prototype Results:")logger.info("-"*60)for idx inrange(len(test_labels)): true_label = test_labels[idx].item() pred_label = proto_predictions[idx].item() class_name = train_dataset.classes[true_label] pred_name = train_dataset.classes[pred_label] correct_mark ="✓"if true_label == pred_label else"✗" logger.info(f" {correct_mark}{class_name:20s} → {pred_name}")```:::{.callout-note}## Understanding Prototype Networks**How it works:**1. Pass K examples per class through the model to get output representations (logits)2. Compute prototype (mean logits) for each class3. Classify new samples by finding nearest prototype using cosine similarity**Why it's better than zero-shot:**- Uses a few labeled examples to establish class centroids in output space- No training required - just forward passes and averaging- Expected performance: 30-50% (vs 11% zero-shot)**Key insight**: Even with a randomly initialized decoder, the output space has enough structure from the Prithvi backbone that averaging a few examples per class creates meaningful prototypes.:::### Step 6b: Linear Probing - Fast AdaptationLinear probing freezes the backbone and trains only the decoder head with few examples. This is much faster than full fine-tuning.```{python}# Create fresh model for linear probinglinear_probe_model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", decoder="FCNDecoder", num_classes=num_classes)linear_probe_model = linear_probe_model.to(device)# Freeze backbone completelylogger.info("Freezing Prithvi backbone...")for name, param in linear_probe_model.named_parameters():if'encoder'in name or'backbone'in name or'model.model'in name: param.requires_grad =Falsetrainable =sum(p.numel() for p in linear_probe_model.parameters() if p.requires_grad)total =sum(p.numel() for p in linear_probe_model.parameters())logger.info(f"Trainable parameters: {trainable:,} / {total:,} ({100*trainable/total:.1f}%)")logger.info("")# Try different k-shot settingsk_shots = [1, 5, 10]linear_probe_results = {}for k in k_shots: logger.info(f"Linear Probing: {k}-shot") logger.info("="*60)# Create k-shot dataset few_shot_subset, _ = create_few_shot_dataset(train_dataset, k_shot=k) few_shot_transformed = TransformedDataset(few_shot_subset, transform) few_shot_loader = DataLoader(few_shot_transformed, batch_size=min(32, len(few_shot_transformed)), shuffle=True)# Reset decoder weights linear_probe_model = model_factory.build_model( task="classification", backbone="prithvi_eo_v1_100", decoder="FCNDecoder", num_classes=num_classes ) linear_probe_model = linear_probe_model.to(device)# Freeze backbonefor name, param in linear_probe_model.named_parameters():if'encoder'in name or'backbone'in name or'model.model'in name: param.requires_grad =False# Train decoder only probe_optimizer = torch.optim.Adam( [p for p in linear_probe_model.parameters() if p.requires_grad], lr=1e-3# Higher LR since only training head ) probe_criterion = nn.CrossEntropyLoss()# Train for more epochs on small dataset epochs =50 linear_probe_model.train()for epoch inrange(epochs):for images, labels in few_shot_loader: images = images.to(device) labels = labels.to(device) probe_optimizer.zero_grad() outputs = linear_probe_model(images)ifhasattr(outputs, 'output'): outputs = outputs.output loss = probe_criterion(outputs, labels) loss.backward() probe_optimizer.step()# Evaluate on same test samples linear_probe_model.eval()with torch.no_grad(): outputs = linear_probe_model(zero_shot_images)ifhasattr(outputs, 'output'): outputs = outputs.output _, linear_predictions = outputs.max(1) linear_correct = linear_predictions.eq(zero_shot_labels).sum().item() linear_accuracy = linear_correct /len(zero_shot_labels) linear_probe_results[k] = linear_accuracy logger.info(f"{k}-shot Accuracy: {linear_accuracy:.4f} ({linear_accuracy*100:.2f}%)") logger.info(f"Correct: {linear_correct}/{len(zero_shot_labels)} samples") logger.info("")# Summary comparisonlogger.info("Data Efficiency Comparison")logger.info("="*60)logger.info(f"Zero-shot (0 examples): {zero_shot_accuracy:.4f} ({zero_shot_accuracy*100:.2f}%)")logger.info(f"Prototypes ({k_shot}-shot): {proto_accuracy:.4f} ({proto_accuracy*100:.2f}%)")for k, acc in linear_probe_results.items(): logger.info(f"Linear Probe ({k}-shot): {acc:.4f} ({acc*100:.2f}%)")logger.info(f"Random Baseline: {1.0/len(train_dataset.classes):.4f} ({100.0/len(train_dataset.classes):.2f}%)")```:::{.callout-note}## Understanding Linear Probing**How it works:**1. Freeze pretrained backbone (no updates to 100M parameters)2. Train only decoder head (~10K parameters)3. Use few examples per class**Why it's efficient:**- Much faster than full fine-tuning (seconds vs minutes)- Less prone to overfitting with few examples- Expected performance: 1-shot (30%), 5-shot (60%), 10-shot (75%)**Key insight**: Foundation model features are so good that you can achieve strong performance by just learning a simple mapping (linear layer) from features to classes.:::## Part 5: Full Fine-Tuning - Maximum PerformanceNow we'll (briefly!) train the model and compare performance to the zero-shot baseline.### Step 8: Define Loss FunctionThe loss function is used to train the model. It is a measure of how good the model is at predicting the correct class. We use the `CrossEntropyLoss` loss function for classification tasks.```{python}#| tangle: geogfm/training/simple_trainer.pycriterion = nn.CrossEntropyLoss()```### Step 7: Define OptimizerThe optimizer is used to update the model's parameters. We use the `Adam` optimizer for classification tasks. It is a [stochastic gradient descent](https://en.wikipedia.org/wiki/Stochastic_gradient_descent) optimizer that is a popular optimizer for deep learning.```{python}#| tangle: geogfm/training/simple_trainer.py#| mode: appendoptimizer = torch.optim.Adam(model.parameters(), lr=1e-4)```### Step 6: Define Training LoopLet's break down what happens during training and validation of a deep learning model:**Training Loop: Step-by-Step**1. **Set model to training mode**: This enables layers like dropout and batch normalization to behave appropriately during training.2. **Iterate over training batches**: For each batch in the training data: - **Move data to the device** (CPU or GPU). - **Zero (reset) the gradients** from the previous step. - **Forward pass**: Input images are passed through the model to produce predictions. - **Compute the loss**: The loss function compares predictions to ground-truth labels. - **Backward pass**: Compute gradients of the loss with respect to each parameter. - **Optimizer step**: Update parameters by taking a step in the direction that reduces the loss. - **Track statistics**: Optionally record loss and accuracy for reporting.```{python}#| tangle: geogfm/training/simple_trainer.pyimport torchimport torch.nn as nndef train_one_epoch(model, train_loader, criterion, optimizer, device):""" Train for one epoch. Parameters ---------- model : nn.Module The model to train train_loader : DataLoader Training data loader criterion : nn.Module Loss function optimizer : torch.optim.Optimizer Optimizer for parameter updates device : torch.device Device to run on Returns ------- tuple (average_loss, accuracy) """ model.train() # Set model to training mode running_loss =0.0# Running loss correct =0# Correct predictions total =0# Total predictionsfor images, labels in train_loader:# Move data to device images = images.to(device) # Move data to device labels = labels.to(device) # Move data to device# Zero gradients optimizer.zero_grad()# Forward pass outputs = model(images)# TerraTorch models return ModelOutput object# Extract the tensorifhasattr(outputs, 'output'): outputs = outputs.output # Extract tensor from ModelOutput# Compute loss loss = criterion(outputs, labels) # Backward pass loss.backward()# Update parameters optimizer.step()# Track metrics running_loss += loss.item() # Add loss to running loss _, predicted = outputs.max(1) # Get predicted class total += labels.size(0) # Add number of labels to total# Add number of correct predictions to total correct += predicted.eq(labels).sum().item() epoch_loss = running_loss /len(train_loader) # Calculate average loss epoch_acc = correct / total # Calculate average accuracyreturn epoch_loss, epoch_acc```**Validation Loop: Step-by-Step**1. **Set model to evaluation mode**: This disables/dropouts and sets batch normalization to use running statistics.2. **Disable gradients**: Turn off gradient computation to reduce memory and computation cost.3. **Iterate over validation batches**: For each batch in the validation data: - **Move data to the device**. - **Forward pass**: Pass images through the model to get predictions. - **Compute the loss**: Evaluate how well predictions match ground-truth labels. - **Track statistics**: Record loss and accuracy, just as in training.```{python}#| tangle: geogfm/training/simple_trainer.py#| mode: appenddef validate(model, val_loader, criterion, device):""" Validate the model. Parameters ---------- model : nn.Module The model to validate val_loader : DataLoader Validation data loader criterion : nn.Module Loss function device : torch.device Device to run on Returns ------- tuple (average_loss, accuracy) """ model.eval() # Set model to evaluation mode running_loss =0.0# Running loss correct =0# Correct predictions total =0# Total predictionswith torch.no_grad():for images, labels in val_loader:# Move data to device images = images.to(device) # Move data to device labels = labels.to(device) # Move data to device# Forward pass outputs = model(images)# Extract tensor from ModelOutputifhasattr(outputs, 'output'): outputs = outputs.output # Extract tensor from ModelOutput# Compute loss loss = criterion(outputs, labels) # Compute loss# Track metrics running_loss += loss.item() # Add loss to running loss _, predicted = outputs.max(1) # Get predicted class total += labels.size(0) # Add number of labels to total# Add number of correct predictions to total correct += predicted.eq(labels).sum().item() epoch_loss = running_loss /len(val_loader) # Calculate average loss epoch_acc = correct / total # Calculate average accuracyreturn epoch_loss, epoch_acc```**Key Differences between Training and Validation Loops**:- **Parameter updates**: Only the training loop updates parameters via backpropagation and optimizer steps; the validation loop does not.- **Model mode**: The training loop uses `model.train()`; the validation loop uses `model.eval()`.- **Gradient calculation**: Gradients are computed (and accumulated) in training, but turned off in validation (using `torch.no_grad()`).- **Purpose**: Training optimizes the model's weights, while validation evaluates the model's current performance without influencing parameters.By writing out these loops explicitly, we gain transparency: it's much easier to spot bugs, add logging, customize behavior, and truly understand every step of model training.### Step 7: Develop a Training Loop the ModelLet's put it all together in the `train_model` function. This function:- Implements both the training and validation loops. - Sets up the training and validation data loaders, and the optimizer. - Records the training and validation loss and accuracy for each epoch. - Prints the progress every 5 epochs. - Returns the training history (loss and accuracy for each epoch).```{python}#| tangle: geogfm/training/simple_trainer.py#| mode: appenddef train_model( model, # Model to train train_loader, val_loader, # Validation data device=None, # Device to use for training epochs=15, # Number of epochs lr=1e-4, # Learning rate criterion=None, # Loss function optimizer=None, # Optimizer):""" Full training loop. Parameters ---------- model : nn.Module Model to train train_loader : DataLoader Training data val_loader : DataLoader Validation data epochs : int Number of epochs, default is 15 lr : float Learning rate, default is 1e-4 device : torch.device Device to use criterion : nn.Module Loss function, default is CrossEntropyLoss optimizer : torch.optim.Optimizer Optimizer, default is Adam Returns ------- dict Training history with losses and accuracies """# Setup trainingif criterion isNone: logger.info("Using default loss function: CrossEntropyLoss") criterion = nn.CrossEntropyLoss()if optimizer isNone: logger.info("Using default optimizer: Adam") optimizer = torch.optim.Adam(model.parameters(), lr=lr)if device isNone: logger.info("Using default device: cpu") device ='cpu' history = {'train_loss': [], # Training loss'train_acc': [], # Training accuracy'val_loss': [], # Validation loss'val_acc': [] # Validation accuracy } logger.info(f"Training for {epochs} epochs...") logger.info(f"Device: {device}") logger.info(f"Learning rate: {lr}") logger.info(f"")for epoch inrange(epochs):# Train train_loss, train_acc = train_one_epoch( model, train_loader, criterion, optimizer, device )# Validate val_loss, val_acc = validate( model, val_loader, criterion, device )# Record history history['train_loss'].append(train_loss) history['train_acc'].append(train_acc) history['val_loss'].append(val_loss) history['val_acc'].append(val_acc)# Print progress every 5 epochsif (epoch +1) %5==0or epoch ==0: logger.info(f"Epoch {epoch+1}/{epochs}") logger.info(f" Train Loss: {train_loss:.4f}, Train Acc: {train_acc:.4f}") logger.info(f" Val Loss: {val_loss:.4f}, Val Acc: {val_acc:.4f}") logger.info(f"")return history```### Step 8: Train the Model Before we train the model, let's set up some key training parameters. This is just for demonstration purposes. In practice, you would want to use a larger number of epochs and a smaller learning rate.- `EPOCHS`: The number of complete passes through the training dataset. For demonstration, we'll use 15 epochs. Increasing this can lead to better results, but takes longer.- `LEARNING_RATE`: This controls how much the model weights are updated during training. A smaller value (like `1e-4`) means smaller, more stable updates—generally safer for fine-tuning.- We'll use these values in the training loop to show how the model gradually learns and improves over time.Each epoch is a complete pass through the training dataset, and the model is updated based on the loss and accuracy. One EPOCH will take longer than one batch, because it will process all the training data.```{python}# Training configurationEPOCHS =5LEARNING_RATE =1e-4# Train the modelhistory = train_model( model=model, train_loader=train_loader, val_loader=val_loader, epochs=EPOCHS, lr=LEARNING_RATE, device=device, criterion=criterion, # Our CrossEntropyLoss loss function optimizer=optimizer # Our Adam optimizer)logger.info("Training complete!")```:::{.callout-tip}## Training Tips**For better accuracy (production):**- Increase epochs to 50-100- Add learning rate scheduling- Use data augmentation (random flips, rotations)- Fine-tune the entire model (unfreeze backbone)**For faster training:**- Reduce batch size if GPU memory limited- Use mixed precision (torch.cuda.amp)- Freeze backbone layers (only train decoder):::### Step 9: Visualize Training Progress```{python}fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 4))epochs_range =range(1, EPOCHS +1)# Plot lossax1.plot(epochs_range, history['train_loss'], label='Train', marker='o')ax1.plot(epochs_range, history['val_loss'], label='Validation', marker='s')ax1.set_xlabel('Epoch')ax1.set_ylabel('Loss')ax1.set_title('Training and Validation Loss')ax1.legend()ax1.grid(alpha=0.3)# Plot accuracyax2.plot(epochs_range, history['train_acc'], label='Train', marker='o')ax2.plot(epochs_range, history['val_acc'], label='Validation', marker='s')ax2.set_xlabel('Epoch')ax2.set_ylabel('Accuracy')ax2.set_title('Training and Validation Accuracy')ax2.legend()ax2.grid(alpha=0.3)plt.tight_layout()plt.show()logger.info(f"Final Training Accuracy: {history['train_acc'][-1]:.4f}")logger.info(f"Final Validation Accuracy: {history['val_acc'][-1]:.4f}")```### Step 10: Evaluate on Test Set```{python}#| tangle: geogfm/training/simple_trainer.py#| mode: appenddef evaluate_model(model, test_loader, device):""" Evaluate model on test set. Parameters ---------- model : nn.Module Trained model test_loader : DataLoader Test data device : torch.device Device to use Returns ------- dict Test metrics including accuracy and per-class accuracy """ model.eval() correct =0 total =0 class_correct = {} class_total = {}with torch.no_grad():for images, labels in test_loader: images = images.to(device) labels = labels.to(device) outputs = model(images)ifhasattr(outputs, 'output'): outputs = outputs.output _, predicted = outputs.max(1) total += labels.size(0) correct += predicted.eq(labels).sum().item()# Per-class accuracyfor label, pred inzip(labels, predicted): label_item = label.item()if label_item notin class_correct: class_correct[label_item] =0 class_total[label_item] =0 class_total[label_item] +=1if label == pred: class_correct[label_item] +=1 overall_acc = correct / total# Compute per-class accuracies per_class_acc = {}for label_idx in class_correct.keys(): per_class_acc[label_idx] = class_correct[label_idx] / class_total[label_idx]return {'overall_accuracy': overall_acc,'per_class_accuracy': per_class_acc,'total_samples': total }``````{python}# Evaluate on test settest_results = evaluate_model(model, test_loader, device)logger.info(f"Test Set Evaluation")logger.info(f"="*50)logger.info(f"Overall Accuracy: {test_results['overall_accuracy']:.4f}")logger.info(f"Total Test Samples: {test_results['total_samples']}")logger.info(f"Per-Class Accuracy:")logger.info(f"-"*50)for label_idx, acc insorted(test_results['per_class_accuracy'].items()): class_name = train_dataset.classes[label_idx] logger.info(f" {class_name:20s}: {acc:.4f}")```:::{.callout-note}## Expected PerformanceWith only a limited number of epochs of training, you should see:- **Overall accuracy: 80-95%**- Some improvement in accuracy on distinct classes (Forest, Water)- Some improvement in accuracy on similar classes (Annual vs Permanent Crop):::### Step 11: Visualize PredictionsLet's see what the model is predicting.```{python}#| tangle: geogfm/training/simple_trainer.py#| mode: appenddef visualize_predictions(model, dataset, class_names, device, num_samples=9):""" Visualize model predictions on random samples. Parameters ---------- model : nn.Module Trained model dataset : Dataset Dataset to sample from class_names : list List of class names device : torch.device Device to use num_samples : int Number of samples to visualize """import matplotlib.pyplot as pltimport numpy as np model.eval()# Get random samples indices = np.random.choice(len(dataset), num_samples, replace=False)# Create subplot grid rows =int(np.sqrt(num_samples)) cols =int(np.ceil(num_samples / rows)) fig, axes = plt.subplots(rows, cols, figsize=(3*cols, 3*rows))if num_samples ==1: axes = [axes]else: axes = axes.ravel()with torch.no_grad():for idx, sample_idx inenumerate(indices): image, true_label = dataset[sample_idx]# Get prediction image_batch = image.unsqueeze(0).to(device) output = model(image_batch)ifhasattr(output, 'output'): output = output.output _, predicted = output.max(1) pred_label = predicted.item()# Create RGB visualization from first 3 bands rgb = image[[2, 1, 0], :, :].numpy() # Assuming bands 2,1,0 are R,G,B-like rgb = np.transpose(rgb, (1, 2, 0))# Normalize for display rgb_min, rgb_max = rgb.min(), rgb.max()if rgb_max > rgb_min: rgb_norm = (rgb - rgb_min) / (rgb_max - rgb_min)else: rgb_norm = rgb# Plot axes[idx].imshow(rgb_norm)# Color code: green if correct, red if wrong color ='green'if pred_label == true_label else'red' axes[idx].set_title(f"True: {class_names[true_label]}\n"f"Pred: {class_names[pred_label]}", color=color, fontsize=9 ) axes[idx].axis('off') plt.tight_layout() plt.show()``````{python}# Visualize predictionsvisualize_predictions( model=model, dataset=test_dataset_transformed, class_names=train_dataset.classes, device=device, num_samples=9)```## Key Takeaways### What You Learned1. **Library-Native Workflows** - TorchGeo for standardized datasets - TerraTorch for foundation models - No custom data loading needed2. **Progressive Transfer Learning Approaches** - **Zero-shot (0 examples)**: ~11% - Random decoder, backbone features only - **Prototype Networks (5 examples/class)**: ~30-50% - No training, just output space averaging - **Linear Probing (1-10 examples/class)**: ~30-75% - Train decoder only, backbone frozen - **Full Fine-tuning (thousands of examples)**: ~80-95% - Train entire model3. **Data Efficiency of Foundation Models** - Pretrained features enable learning from minimal data - 5-10 examples per class can achieve 60-75% accuracy - Huge reduction in labeling effort vs training from scratch - Foundation models make few-shot learning practical4. **Explicit Training Loops** - Full visibility into training process - Easy to debug and modify - Understand every step - Compare training regimes side-by-side### Next Steps**Week 3b will introduce:**- PyTorch Lightning for automation- TerraTorch Tasks interface- Experiment tracking and logging- Multi-GPU training- Production deployment patterns**For now, practice with:**- Different TorchGeo datasets (BigEarthNet, Sen12MS, etc.)- Different backbones (SatMAE, ScaleMAE, Clay)- Different k-shot settings (try 3-shot, 20-shot, 50-shot)- Compare prototype networks vs linear probing- Longer training runs for full fine-tuning (50-100 epochs)## Resources### Documentation- [TorchGeo Docs](https://torchgeo.readthedocs.io/)- [TerraTorch GitHub](https://github.com/IBM/terratorch)- [Prithvi Models](https://huggingface.co/ibm-nasa-geospatial)### Datasets- [EuroSAT Paper](https://ieeexplore.ieee.org/document/8736785)- [TorchGeo Datasets](https://torchgeo.readthedocs.io/en/stable/api/datasets.html)### Models- [TerraTorch Model Zoo](https://github.com/IBM/terratorch/blob/main/MODEL_ZOO.md)- [Prithvi Paper](https://arxiv.org/abs/2310.18660):::{.callout-tip}## Extension Ideas**Try these modifications:**1. **Few-Shot Variations**: Compare different K values (1, 3, 5, 10, 20, 50)2. **Distance Metrics**: Try Euclidean distance instead of cosine similarity for prototypes3. **Feature Visualization**: Use t-SNE or UMAP to visualize Prithvi feature clusters4. **Data Augmentation**: Add random flips, rotations for few-shot training5. **Learning Rate Scheduling**: Use ReduceLROnPlateau or CosineAnnealingLR6. **Ensemble**: Combine prototype networks + linear probing predictions7. **Cross-Dataset Transfer**: Train on EuroSAT, test on BigEarthNet8. **Export**: Save model weights and load for inferenceAll of these build on the foundation you learned today.::::::{.callout-warning}## Troubleshooting**Common Issues:****"RuntimeError: CUDA out of memory"**- Reduce batch size- Use smaller model- Use gradient checkpointing**"ImportError: No module named 'terratorch'"**- Install: `pip install terratorch`- Verify: `python -c "import terratorch; print(terratorch.__version__)"`**"Download failed"**- Check internet connection- Manually download EuroSAT from source- Set download=False and point to existing data**"Model output shape mismatch"**- Verify band selection (6 bands for Prithvi)- Check num_classes matches dataset- Ensure transforms applied correctly**Low accuracy (<50%)**- Verify labels are correct- Check data normalization- Increase training epochs- Try different learning rate:::